LarvaBot
September 2021 - Present
Stage 1: Hardware
September 2021 - December 2021
-
Designed and built a compliant robot imitating the motion of worms, driving with 8 motors controlled by a Raspberry Pi.
-
Program with python to move straight, turn and dance, with simple sinusoidal actuation patterns.
December 2022 - Expected March 2022
-
Adding sensors with I2C protocol.
-
Programing ROS2 nodes (for sensors and motors) and controllers in C++ to do better in moving straight, turning, and combined, also odometer and obstacle avoidance.
Stage 3: Intelligence
Future
-
Train kinematic models of the head related to the body, and add a camera at the front.
- SLAM.
- Explore more about what it can do.
Skill Used:
-
SolidWorks
-
Topological Optimization
-
3D Printing
-
Linux
-
Python
-
C++
-
ROS2
-
I2C Protocol
-
Control Theory
Hardware and Motion Achieved after Stage 1
Stage 1: Hardware
Gallary of LarvaBot






How It Works
Circuit:

Motion of Compliant Body:
-
As tendons pulled by servos (red arrows), the compliant body bends (blue arrows). There are 3 DOF for each compliant body

Conceptual Sketches

Sketch of LarvaBot Idea 1: The Finally Chosen Sketch

Sketch of LarvaBot Idea 2
Preliminary CAD Draft

Render of Preliminary Design

Animation of Walking Motion

Exploded View of Preliminary Design
Detailed CAD

Render of Detailed Design


Topological Optimization of Head and Neck


Detail Render of Compliant Body and Head Joint
3D Print Parts
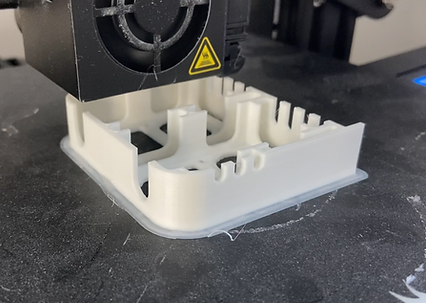
3D Printing with Ender-3 Printer

Using Mouse Ear to Prevent Warping at Corners
Assemble LarvaBot




Assembling LarvaBot

Final Assembly
Write Code and Use Raspberry Pi to Run

Wrote and Ran Control Code on Raspberry Pi OS with Python
Simulation with PyBullet
Actuating LarvaBot in PyBullet
Stage 2: Software
Conceptual Design and Setup
Switched to Ubuntu Server OS to be More Efficient
Sensor Communication

Checking I2C Addresses
Testing Sensor Modules

Motor and Control
Coming soon, please stay tuned...